產(chǎn)品中心 Products
-
球閥
燃氣球閥 | 卡套式球閥 | 高溫球閥 | 二片式球閥 | 電動球閥 | 手動球閥 | 焊接球閥 | 三通球閥 | 不銹鋼球閥 | 氣動球閥 | 內螺紋球閥 | 固定式球閥 | 三片式球閥 | 保溫球閥 | 一片式球閥 | 真空球閥 | 襯氟球閥 | 法蘭球閥 | 高壓球閥 | 衛(wèi)生級球閥 | 硬密封球閥 | -
蝶閥
襯氟蝶閥 | 軟密封蝶閥 | 信號蝶閥 | 手動蝶閥 | 電動蝶閥 | 法蘭蝶閥 | 氣動蝶閥 | 不銹鋼蝶閥 | 偏心蝶閥 | 伸縮蝶閥 | 真空蝶閥 | 蝸輪蝶閥 | 硬密封蝶閥 | 焊接蝶閥 | 對夾式蝶閥 | 衛(wèi)生級蝶閥 | -
閘閥
手動閘閥 | 軟密封閘閥 | 內螺紋閘閥 | 襯氟閘閥 | 低溫閘閥 | 國標閘閥 | 碳鋼閘閥 | 電動閘閥 | 信號閘閥 | 法蘭閘閥 | 波紋管閘閥 | 氣動閘閥 | 鍛鋼閘閥 | 不銹鋼閘閥 | -
調節(jié)閥
自立式調節(jié)閥 | 氣動調節(jié)閥 | 電動調節(jié)閥 | -
止回閥
升降式止回閥 | 蝶式止回閥 | 卡套式止回閥 | 多功能止回閥 | 緩閉式止回閥 | 立式止回閥 | 對夾式止回閥 | 旋啟式止回閥 | 內螺紋止回閥 | 梭式止回閥 | 衛(wèi)生級止回閥 | 軸流式止回閥 | 球形止回閥 | 燃氣止回閥 | 法蘭止回閥 | 不銹鋼止回閥 | 消聲止回閥 | 鍛鋼止回閥 | 襯氟止回閥 | -
截止閥
襯氟截止閥 | 氧氣截止閥 | 角式截止閥 | 電動截止閥 | 焊接截止閥 | 手動截止閥 | 不銹鋼截止閥 | 低溫截止閥 | 氣動截止閥 | 燃氣截止閥 | 外螺紋截止閥 | 法蘭截止閥 | 高溫截止閥 | 內螺紋截止閥 | 高壓截止閥 | 角座閥 | 波紋管截止閥 | 鍛鋼截止閥 | -
過濾器
Y型過濾器 | -
電磁閥
-
美標閥門
美標閘閥 | 美標截止閥 | 美標球閥 | 美標蝶閥 | 美標止回閥 | -
水利控制閥
-
針型閥
-
柱塞閥
推薦文章
more +推薦產(chǎn)品
more + 自力式壓力調節(jié)閥
自力式壓力調節(jié)閥
 氣動薄膜調節(jié)閥
氣動薄膜調節(jié)閥

銷售:13671530603
咨詢:021-57522756
郵箱:sw@wotuo.net
地址:上海市奉賢區(qū)川南奉公路9860號

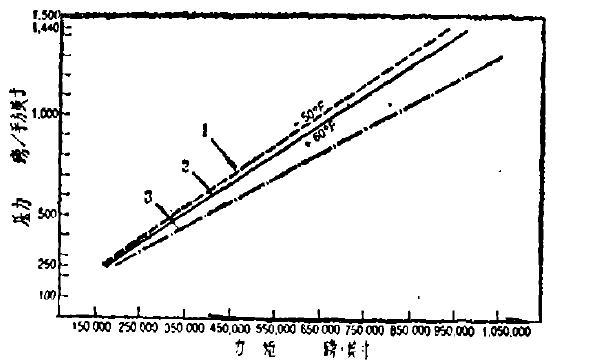
兩臺閥門驅動裝器進行試驗時測試的結果
兩臺閥門驅動裝器進行試驗時測試的結果
采用同一規(guī)格的兩臺閥門驅動裝器進行試驗時,其最后測量值除以2便得到驅動裝置各自的額定力矩值。在傳感臂上的多個動力銷定位插孔使該機構具有靈活性,故當不同的動力傳感器在它們的最佳范圍進行工作時,其力矩范圍可以精確地測出。
由于下層的驅動裝置相對于中層的驅裝置是自由懸掛的,故試驗系統(tǒng)本身內部的摩擦力以及由于安裝誤差引起的應力和軸的彎曲載荷等實質上是不存在的,故其試驗結果便是純力矩測量值。
不同載荷和不同回轉角度時驅動裝置內部摩擦力的測量也是以類似的方法完成的。
小負荷的驅動裝置懸掛地安裝在第三層中,這樣它便能相對應于中層驅動裝置和該系統(tǒng)的中心架在三維空間內自由移動。帶鍵軸插入第三層驅動裝置以及中層驅功裝置的頂部,而中層驅動裝置帶有安裝在鍵軸之間的另一傳感臂機構。當下層和中層的驅動裝置承受變化堰力產(chǎn)生反方向力矩時,第三層或上層驅動裝置承受負荷致使較低層的兩臺驅動裝置的袖產(chǎn)生轉動。頂端傳感臂機構產(chǎn)生總負荷,提供了對下面兩臺驅動裝置的摩擦力矩的測量。因為驅動裝置規(guī)格相同,計算結果及讀數(shù)除以2便為每臺驅動裝置的摩擦力矩。從驅動裝置最大理論力矩偷出值巾減去內部摩擦力矩,用來驗證力矩測量讀數(shù)。
由于驅動裝置的摩擦特性按其負荷變化而變化,故可確定,但不能采用過去靜態(tài)試驗那樣弛做法。出于有了這個新型懸掛系統(tǒng),第三層及下層的驅動裝置能夠在三維空間內相應于中層驅動裝置作橫向移動。該系統(tǒng)本身的性效應,兩臺閥門驅動裝器進行試驗時測試的結果。
由于驅動裝置的內部摩擦阻力可忽略不計,故最大理論力矩值可認為100 有效。這樣,驅動裝置的實際輸出力矩應為最大理論力矩減去驅動裝置本身存在的摩擦力矩值由于回轉葉片結構提供了平衡力矩,故與采用非平衡的止轉棒軛結構的驅動裝置相比較,其摩擦系數(shù)大大減小。
該裝置是由零件組成的整體,每個零件則有自己的百分誤差值。動力傳感器的誤差要求為額定±1%。但當由于漂移和其他原因造成電子儀器誤差時,在放大器輸出端的誤差應為±0.02伏。
所采用的動力傳感器應十分靈敏,以便能測量極小值的剪 變。此外尤為重要的是:動力傳感器在力矩傳感臂上安裝完畢后,儀表所示的剪匝變必須為零。這樣才能保證試驗讀數(shù)值不受應力和其他不利因素的影響。
在試驗數(shù)值 示前和力矩試驗完成后,應持“零位”倔差。這樣的校驗也保證了在試驗承載過程 動力傳感器不致過應力。
裝置中存在其他誤差時,它們應比這兩個誤差源小。假定系統(tǒng)的總誤差來自動力傳感器的校驗和電壓漂移的聯(lián)合作用,即系統(tǒng)總誤差應為兩個誤差相加近似值。
一個新型沒計的懸掛式試驗系統(tǒng),排除了由于裝配誤差所引起彎曲載荷,摩擦力和內應力等影響,最終準確測力矩額定值,仍并不完全代表驅表裝置與閥門安裝的實際數(shù)值。
由于閥門和驅動裝置連接法蘭鏈接安裝誤差和制造公差所引起的摩擦力和,以內應力及閥桿本身的彎曲應力會導致力矩的損失。










 掃一掃
掃一掃